Спецификация: Устанавливается на любой станок Ход фокусировки 28 мм (может быть изменен) Скорость фокусировки до 500 мм/сек Точность 0,1 мм…
Роботы для Вашего сада
Спецификация: Устанавливается на любой станок Ход фокусировки 28 мм (может быть изменен) Скорость фокусировки до 500 мм/сек Точность 0,1 мм…
Specifications: Can be installed at ANY laser cutter machine. Up to 28 mm lenses travel distance (can be customized) Up…
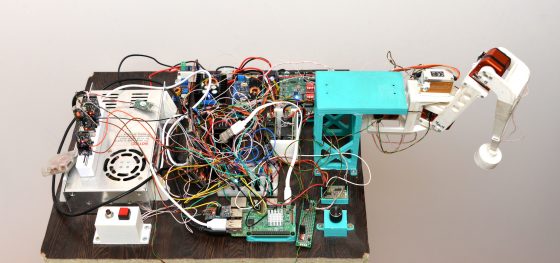
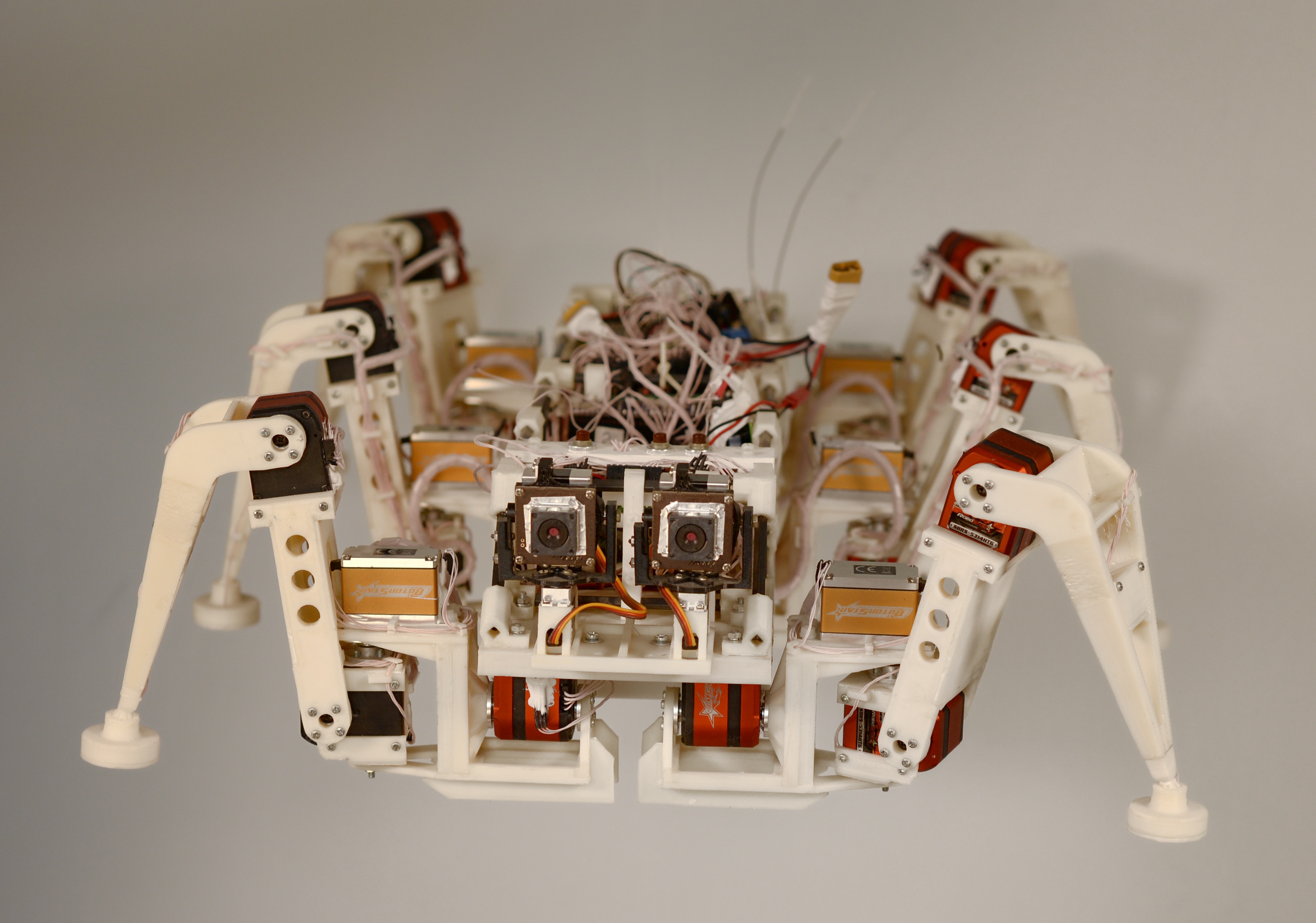

Подготовка к первым шагам робота. Калибровка приводов и датчиков.
Вынес резистор настройки чувствительности датчика касания для каждой опоры в доступное место. Теперь можно подстраивать чувствительность под разный тип грунта.…
Добавил защиту на силовые цепи питания приводов и контроль заряда LiPo батареи.
swift 3.0 linux raspberry pi uart rs232 thread read // // main.swift // uart // // Created by Aleynikov on…