Группа высококвалифицированных профессиональных разработчиков энтузиастов трудятся над созданием робота для индивидуального подсобного хозяйства или приусадебного участка.
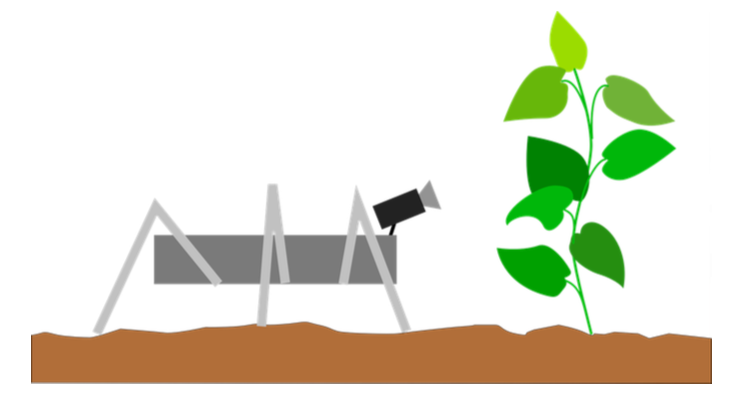
Робот предназначен для обработки участков небольших размеров, в том числе теплиц. Для автоматизации рутинных операций по посадке и уходу за растениями, сбору урожая и прополке. Робот осуществит контроль химического состава почвы и самостоятельно внесет удобрения в необходимых количествах для каждого конкретного растения. Планируется, что робот будет ухаживать за цветами на клумбе без постоянного внимания садовода. Для снижения уплотнения почвы, робот проектируется с шагающим движителем. Площадь следов шагающей машины, по сравнению с колесной, может быть до 30 раз меньше! Этим достигается минимальное уплотнение грунта и отсутсвие травмирования растений. Робот использует экологически чистый источник энергии — электричество, не загрязняет окружающую среду вредными выхлопными газами. Он предназначен для выращивания экологически чистой продукции с точным точечным внесением минимального количества удобрений или вовсе без них.
- Collapse All
2011
- Старт проекта
-
2011В начале 2011-го пришла идея создать робота для сада и теплицы. Каждый из нас знает, что борьба с сорными растениями на дачном участке требует больших затрат ручного труда. Каждый проект начинается с идеи, а этот начался с мечты. Мечта о роботе который с легкостью заменит человека и даст каждому возможность наслаждаться свежими овощами и ягодами с грядки, освободив Вас от рутины прополки сорняков.
Почему именно шагающий робот? Шагающие роботы небольшого размера, по сравнению с колесными, хорошо преодолевают препятствия соизмеримые с размером робота. Робот опирается на грунт точечно и практически не наносит вреда растениям при передвижении.
- От идеи до модели
-
2011-01Я попросил свою знакомую Евдокию помочь мне с дизайном робота. Она мне прислала несколько своих работ. Спасибо ей огромное. Она вдохновила меня на дальнейшую работу над данным проектом. Вот ее рисунки.


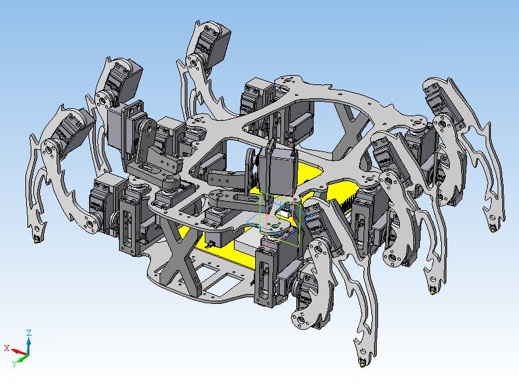
По ее эскизам был задуман робот с агрессивным нравом. Детали были спроектированы для изготовления на фрезерном станке с компьютерным управлением, но высокая стоимость фрезерных работ и постоянно вносимые изменения в конструкцию привели к тому, что от этой затеи пришлось отказаться. В продаже был замечен стандартный алюминиевый прокат, который натолкнул на мысль применить болгарку и болты М3. После недели отрисовки чертежей в КОМПАС’е они были закончены.
 К сожаленю дороговизна изготовления сложных деталей вынудила пойти по более простому и дешевому пути.
К сожаленю дороговизна изготовления сложных деталей вынудила пойти по более простому и дешевому пути.
- Проектирование робота
-
- Выставка
-
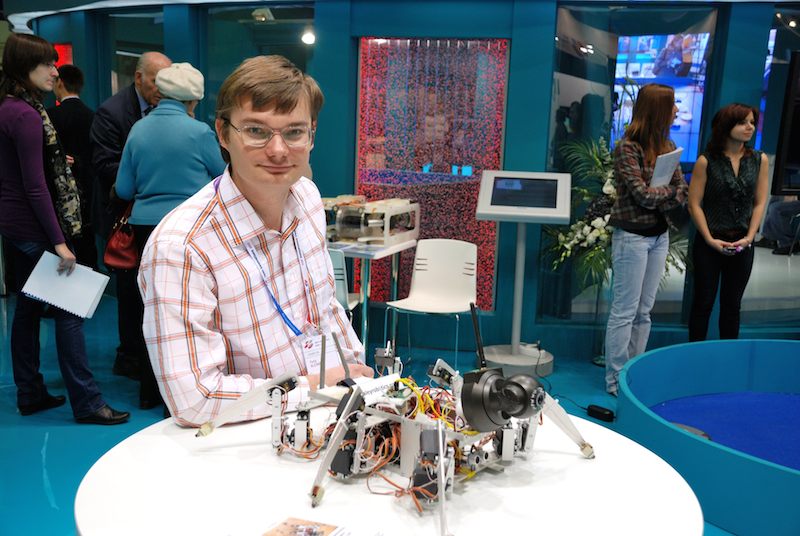
2011-09-12Робот был продемонстрирован на выставке научных достижений в Московском Государственном Агроинженерном Университете им. В.П.Горячкина в октябре 2011 года. А также на Российской агропромышленной выставке «Золотая осень – 2011».

2012
- Обновление электроники
-
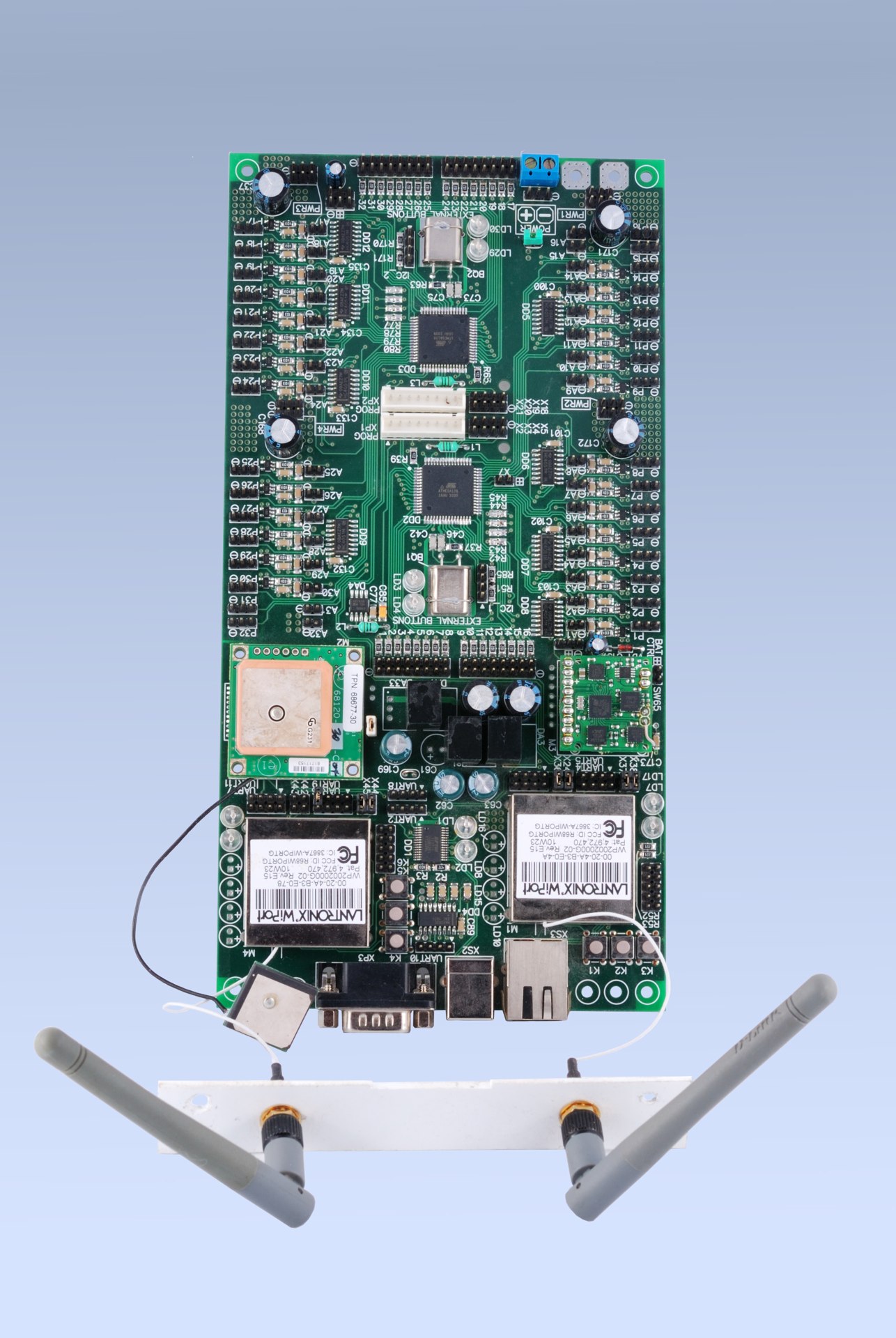
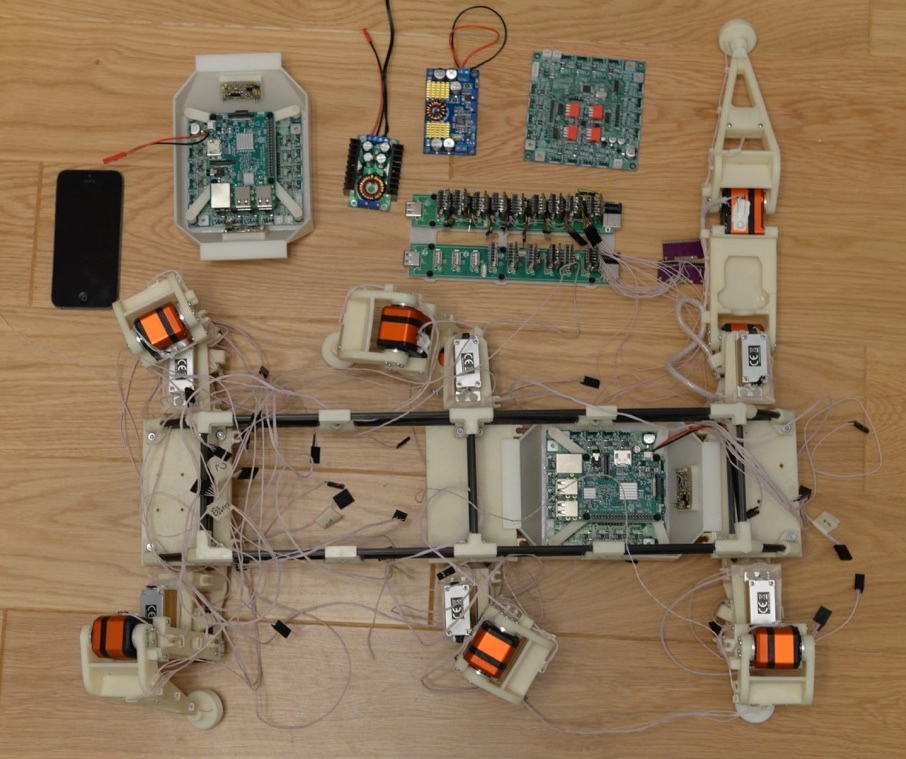
2012-01-01В 2012-м году в конструкцию и электронику были внесены значительные изменения. Доработана система питания обеспечивающая распределение энергии мощностью 450 Вт и создан новый контроллер управления приводами с дублированной беспроводной связью, который позволил собрать множество научных данных.

- Открытые инновации 2012
-
2012-10-31В 2012 годом робот успешно продемонстрирован на форуме “Открытые инновации 2012? который посвящен новейшим технологиям и перспективам международной кооперации.

2013
- Защита диссертации
-
2013-04-1515 апреля 2013 года мною была защищена кандидатская диссертация на тему "Обоснование параметров и режимов движения роботизированной машины"
Цель работы – обоснование параметров и режимов движения роботизированной машины с дискретным колееобразованием.
Для достижения поставленной цели определены следующие задачи исследования:
- Анализ научных предпосылок и тенденций развития электромеханических средств с дискретным колееобразованием.
- Разработка математической модели движения электромеханического средства с дискретным колееобразованием со стабилизацией движения по неровной поверхности.
- Разработка модели электромеханического средства с дискретным колееобразованием со стабилизацией движения по неровной поверхности.
- Оценка экономической эффективности созданных электромеханических и программных средств.
Объекты исследования: модель электромеханического средства с дискретным колееобразованием.
Научная новизна. Выполненные исследования позволили получить совокупность новых положений и результатов, заключающихся в разработке:
- алгоритмов движения механического средства с дискретным колееобразованием со стабилизацией движения;
- математической модели движения электромеханического средства с дискретным колееобразованием;
- электротехнических и программных средств для устойчивого движения для электромеханического средства с дискретным колееобразованием.
Практическая ценность. Разработано новое электротехническое средство с дискретным колееобразованием со стабилизацией движения. А также программные средства позволяющие моделировать и анализировать движение по неровной поверхности.
Автореферат и диссертацию можно скачать на этом сайте в разделе "обо мне".
2014
- Третий опытный образец
-
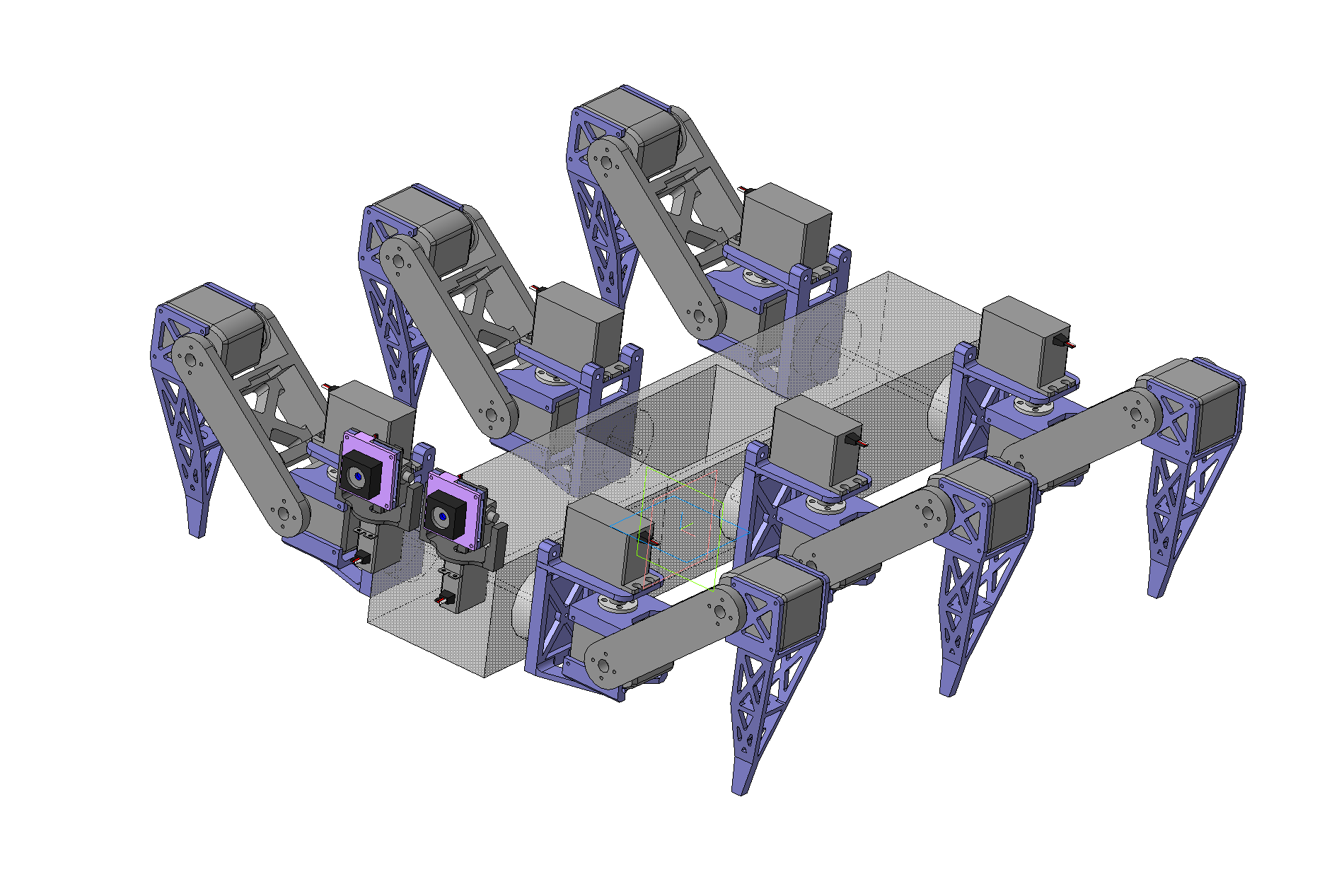
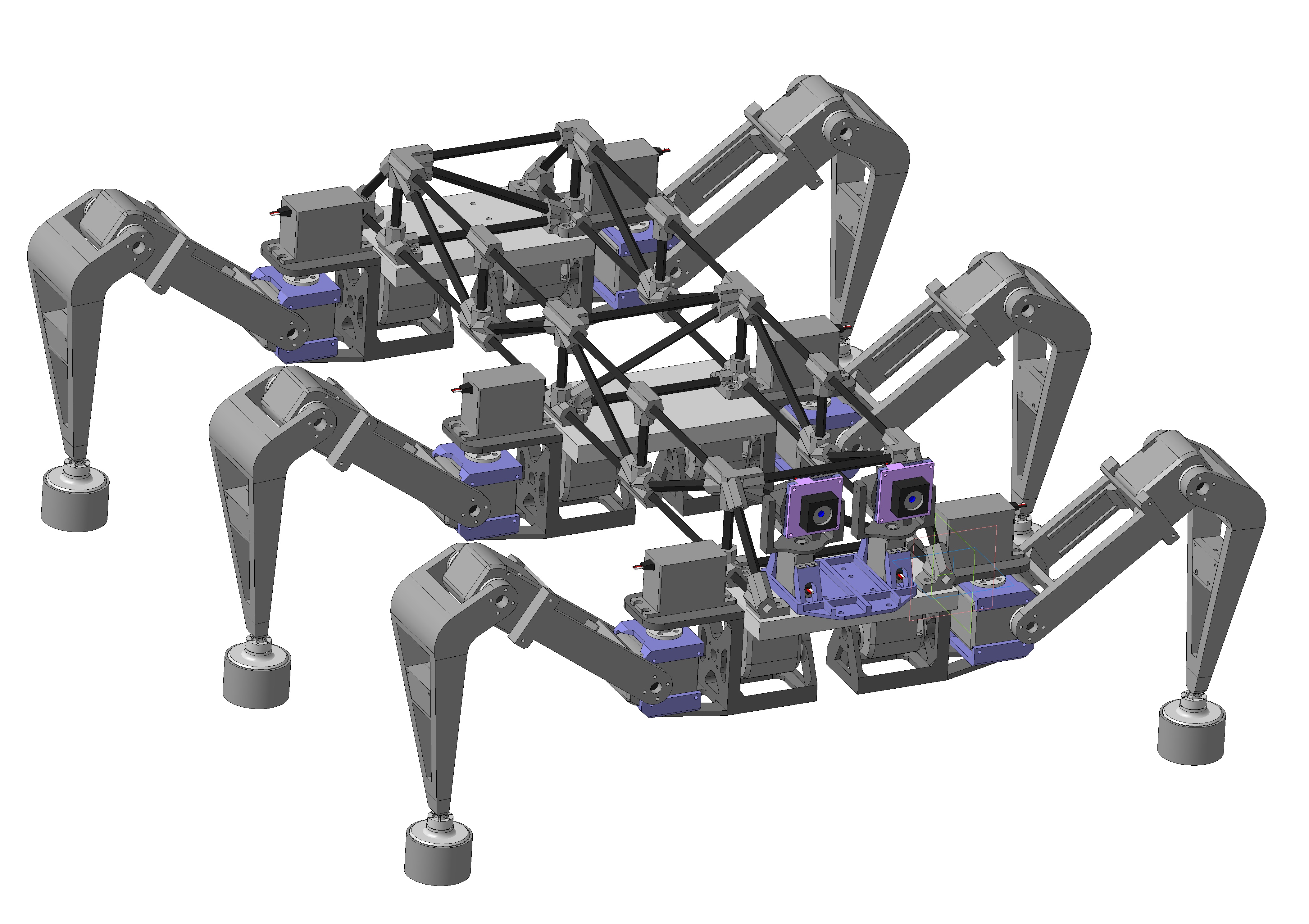
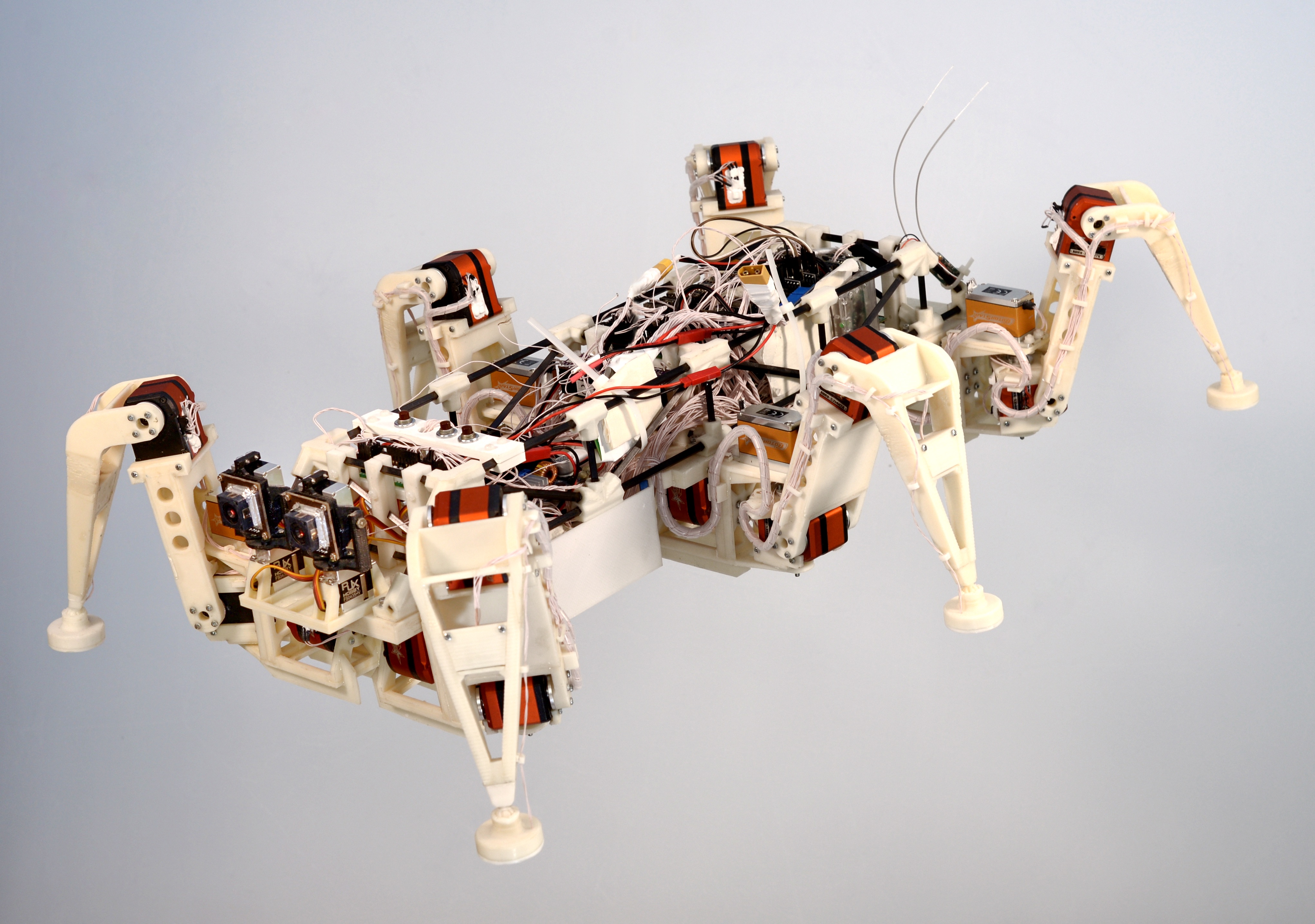
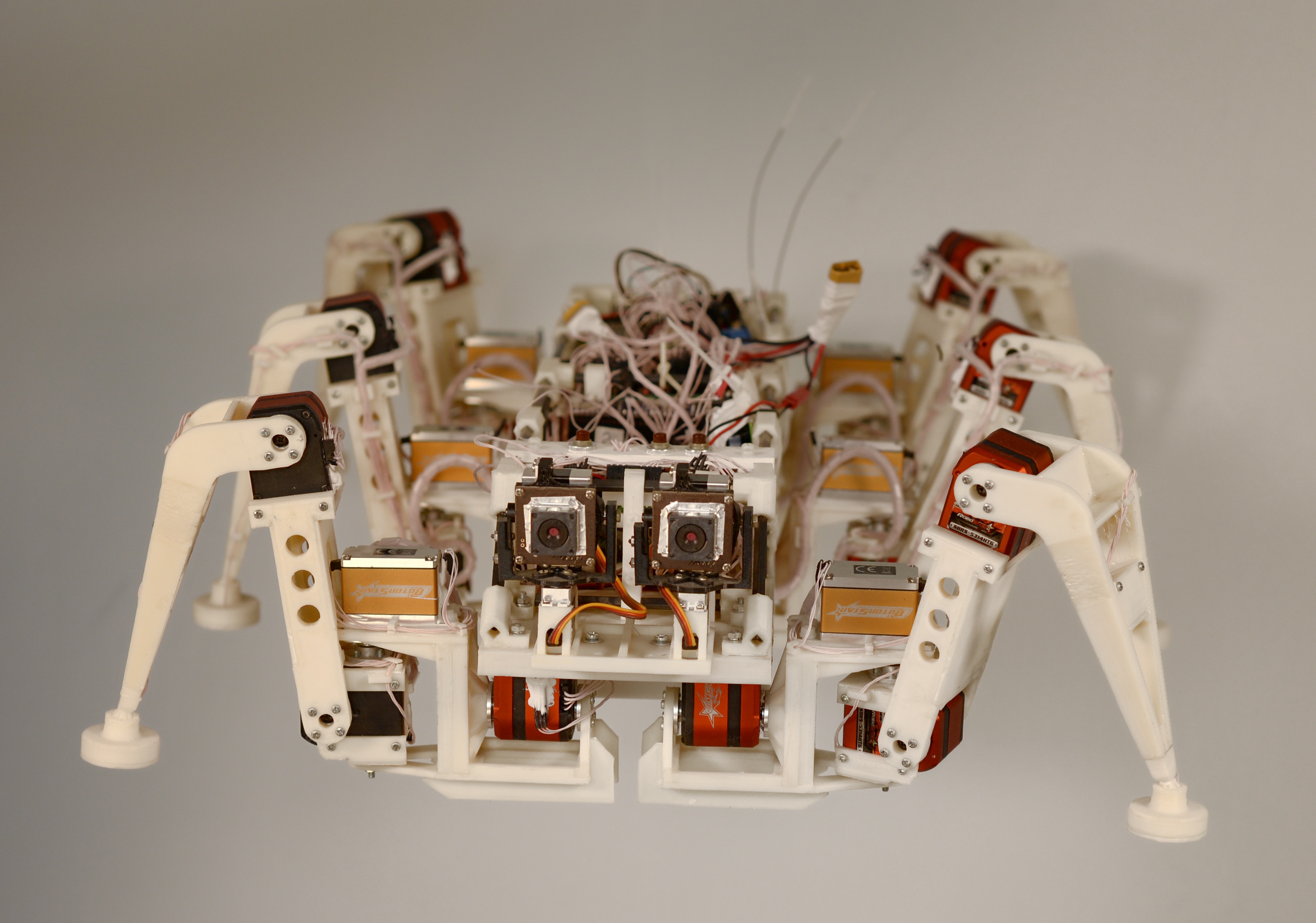
2014-01-01В 2014 стартовал проект третьего опытного образца шагающей машины. На борту машины размещен мощный вычислительный комплекс позволяющий роботу двигаться и ориентироваться на местности самостоятельно без использования спутниковой навигации.
- Прототипирование деталей
-
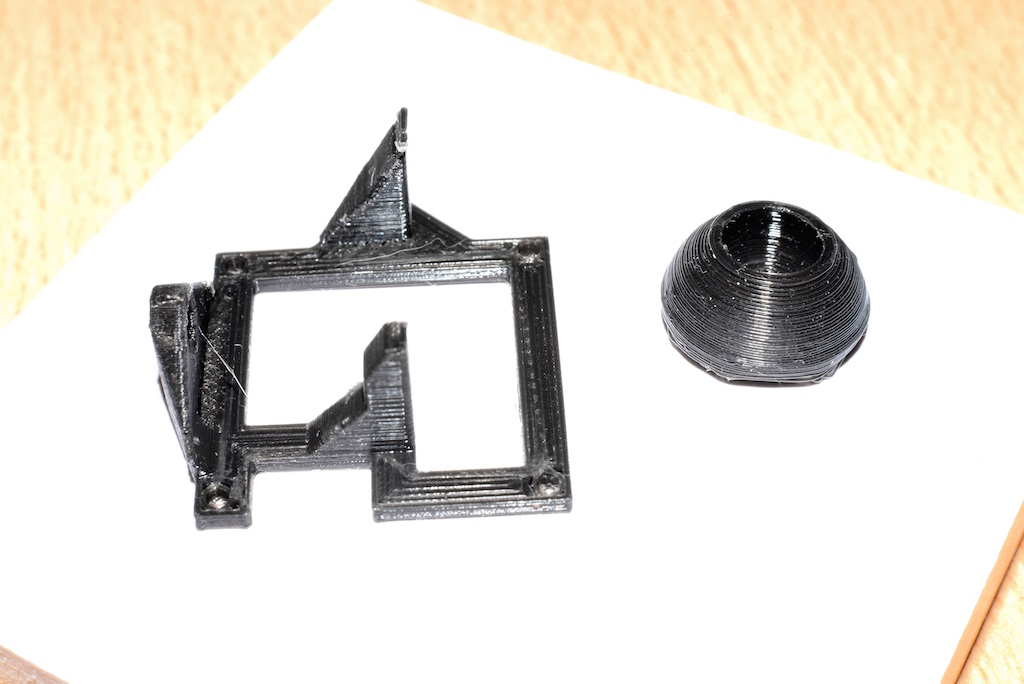
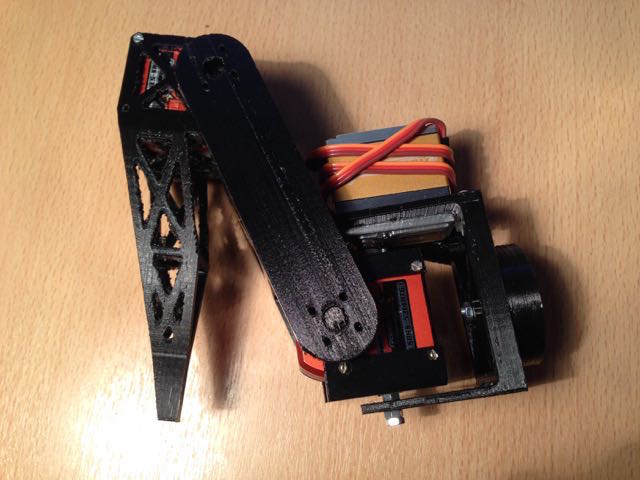
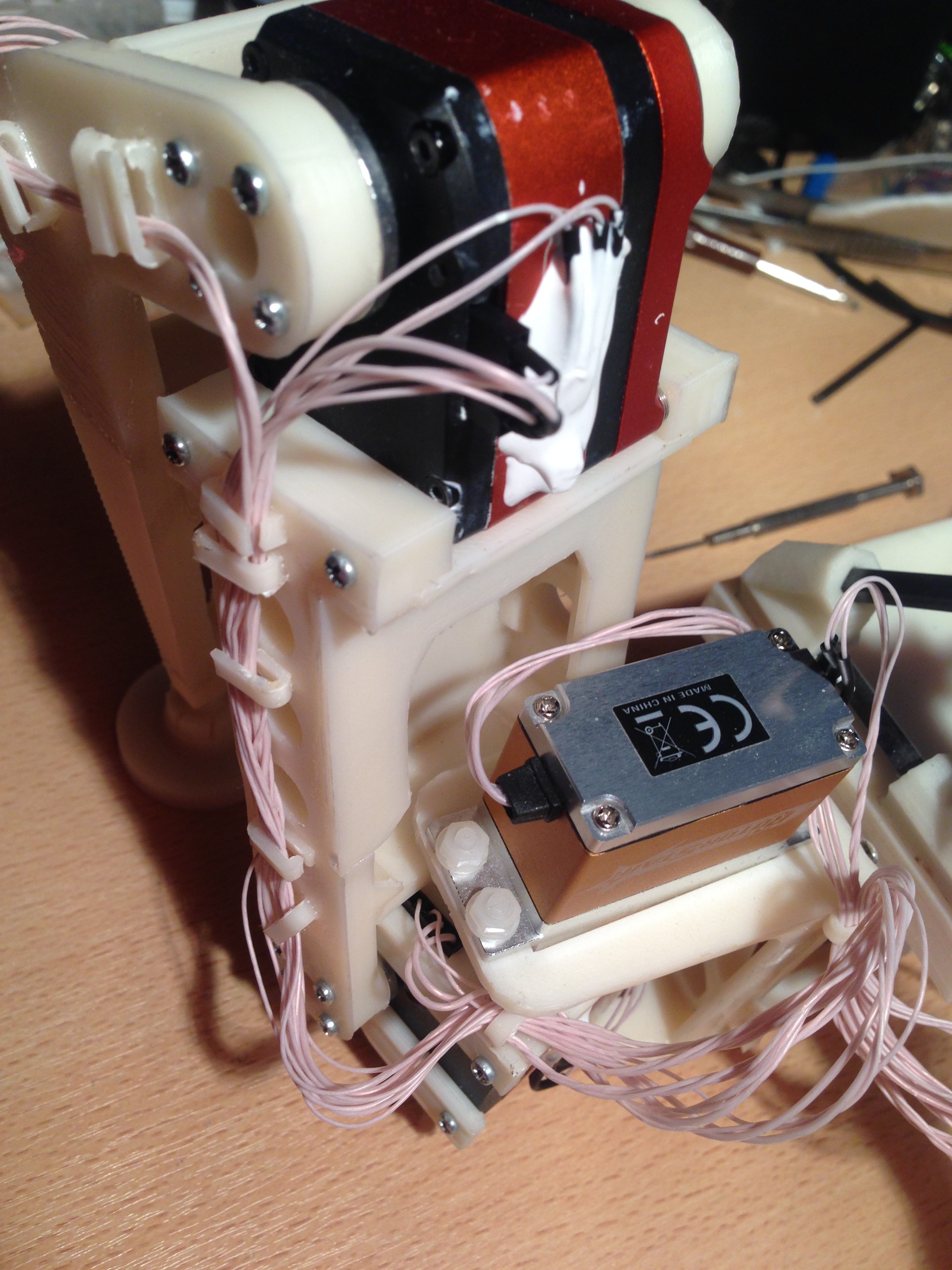
2014-10-27Технология 3D печати позволяет существенно упростить процесс изготовления деталей и их доработку.
В октябре 2014-го года активно ведутся работы по проектированию конструкции. Первые детали уже готовы.

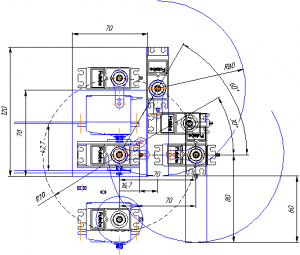
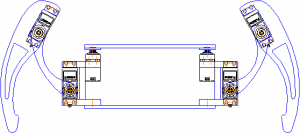
- Прототип крепления камер
-
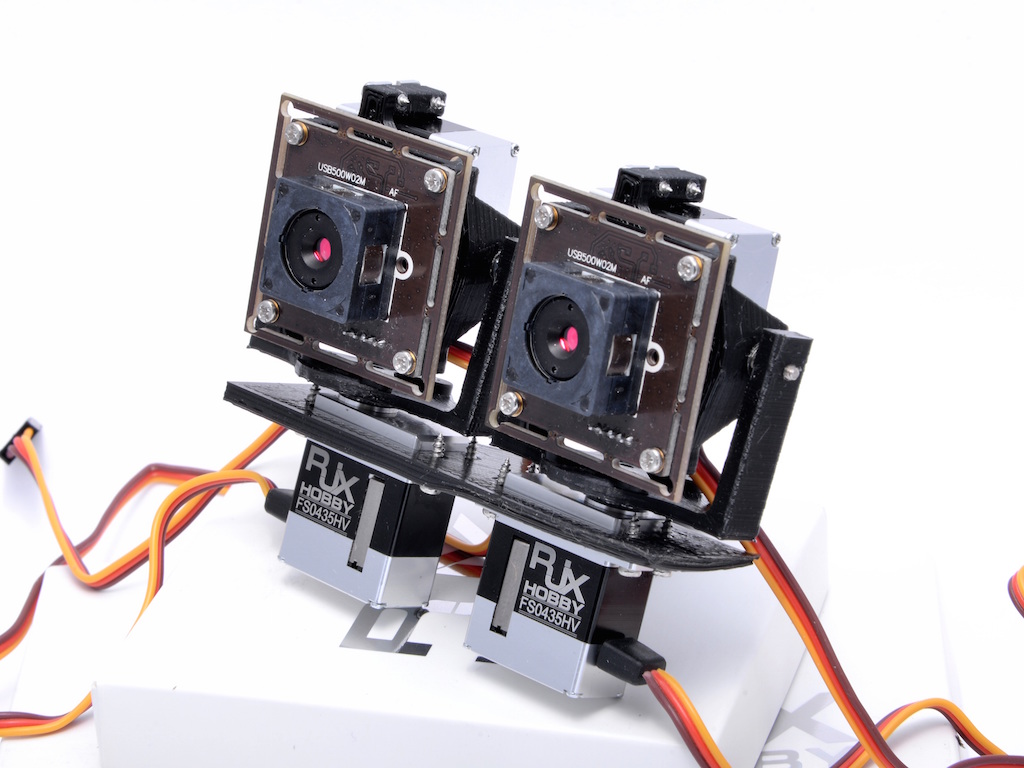
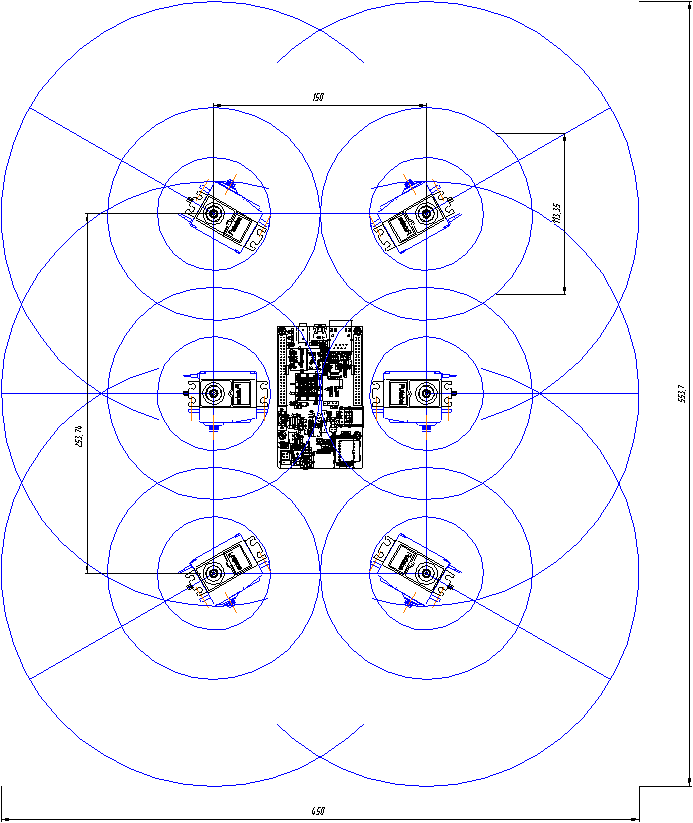
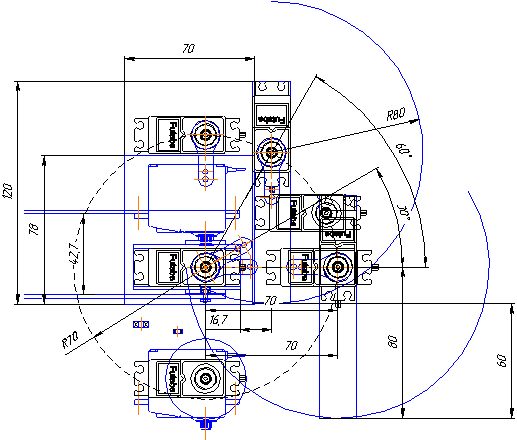
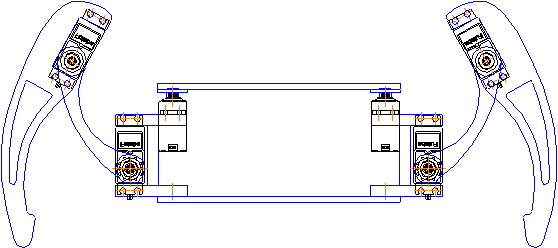
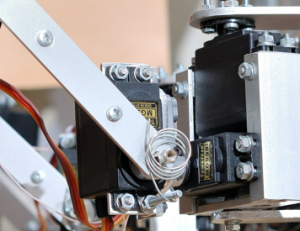
2014-11-20Готов прототип поворотного механизма камер.

- Начало разработки программного обеспечения
-
2014-12-01Сегодня знаменательная дата. Создан базовый проект исходного кода программного обеспечения робота. Получены первые изображения со стерео камер.
- Печать деталей робота
-
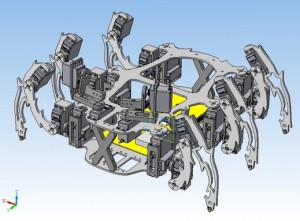
- Разработка конструкции
-
2014-12-23Для проработки конструкции используется программа Компас. Это универсальная система автоматизированного проектирования, позволяющая легко создавать эскизы и чертежи изделий.
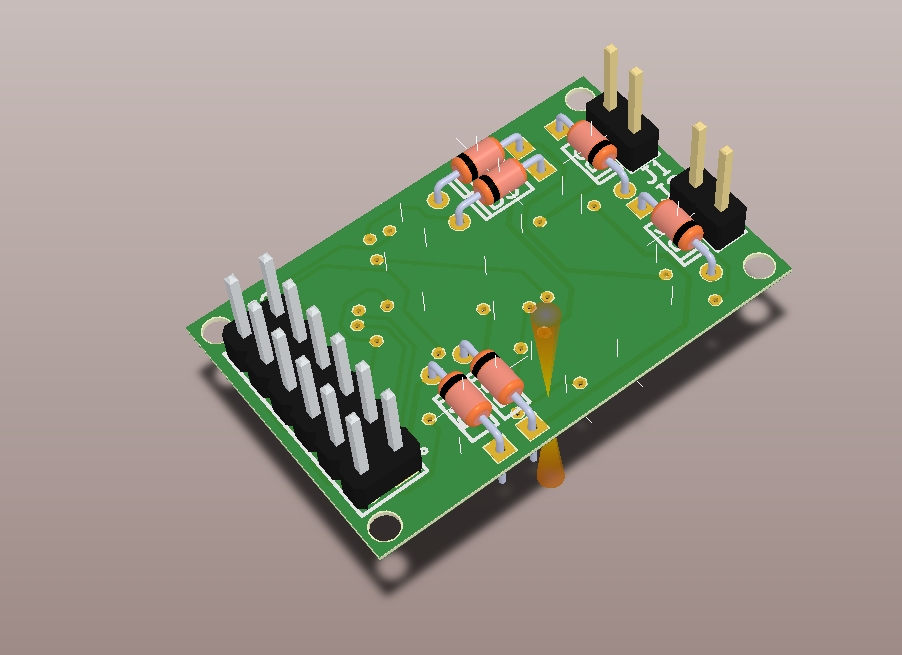
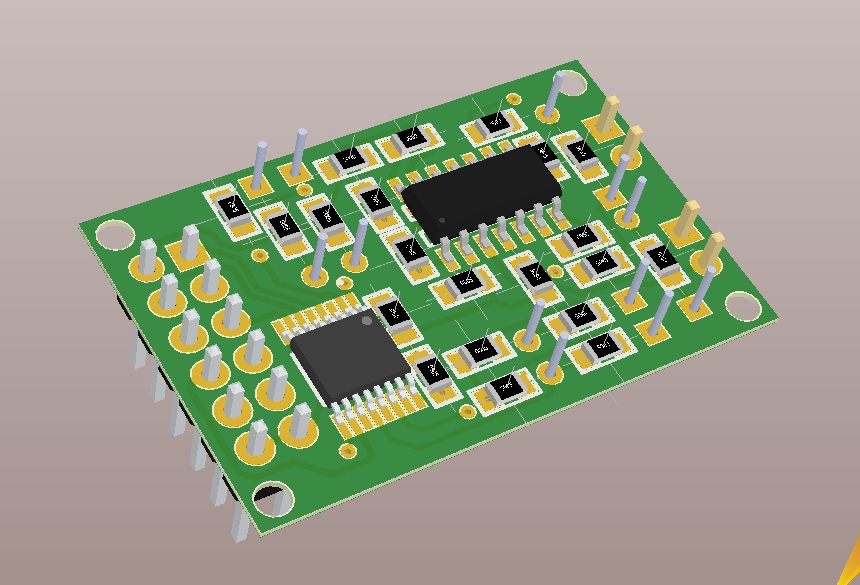
- Контроллер v3
-
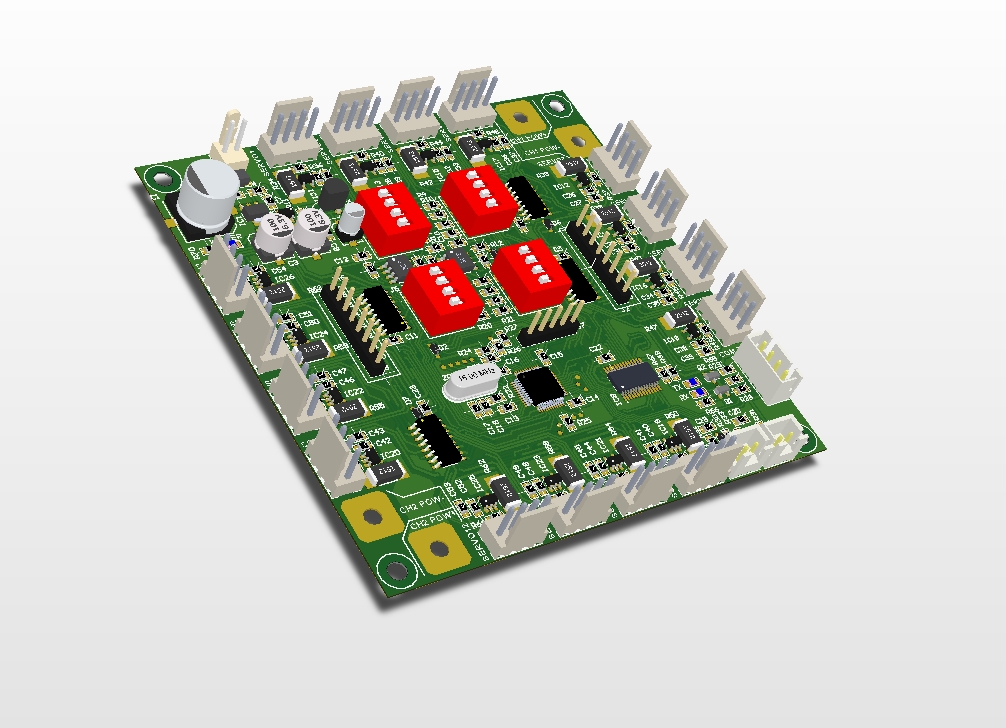
2014-12-31К концу 2014-года планируется завершить работы над аппаратной частью вычислительного комплекса.
В октябре 2014-го завершены работы по определению компонентов аппаратной части и начались работы по проектированию печатной платы контроллера управления движением робота.